
Qualche giorno fa ho avuto il piacere di parlare con il Prof. Alberto Broggi, scoprendo come l’Italia sia tra i paesi che per primi hanno applicato la robotica all’automobile. Ne è scaturita un’interessante intervista, che ho separato in due parti per motivi di spazio.
Prima di riprenderla dov’eravamo rimasti voglio fare una premessa: il VisLab è stato scelto dall’ERC (European Research Council) per rappresentare la ricerca europea a livello mondiale, sostenendo l’Intercontinental Autonomous Challenge (un viaggio da Roma a Shangai senza conducente) in occasione del meeting annuale dell’AAAS, avvenuto nei giorni passati a San Diego.
La prima parte dell’intervista è disponibile a questa pagina, seguono le domande e risposte, riproposte quasi integralmente, per cercare di conservare il sense of wonder del lavoro di Broggi e del Vislab:
…Attualmente il costo di un sistema di guida robotizzato è molto alto, superiore a circa 40mila euro. Sarà possibile in futuro abbassare di uno o due ordini di grandezza il costo, senza ridurre il livello di sicurezza e affidabilità?
Il costo è molto più alto di quanto dice: BRAiVE è costata parecchio, ma ha anche un insieme di sensori sovrabbondante e chiaramente ridondante. L’obiettivo è di portare tutti i sistemi di elaborazione su piattaforme embedded a basso costo. Per alcuni sistemi ci siamo già riusciti. Per i rimanenti… stiamo lavorando. L’obiettivo è chiaramente abbassare i costi per facilitare la penetrazione sul mercato.
I video che ritraggono BRAiVE in azione mostrano tempi di reazione azzerati e spazi d’arresto molto inferiori alla guida “umana”. L’auto sarebbe in grado di evitare un ostacolo a centro curva (un mezzo in avaria) in modo autonomo o si richiede l’intervento umano, per esempio con una “vettura pilota”?
BRAiVE è in grado di evitare ostacoli anche senza vettura di fronte. Abbiamo alcune demo che oggi mostriamo: tra queste guida al centro di un corridoio di ostacoli, frenata davanti al pedone e stop-n-go. Ne stiamo preparando altre, ma ora l’evento Italia-Cina sta assorbendo molte risorse, quindi penso che altre demo saranno pronte non prima di fine anno.
Un piccolo passo indietro: il DARPA Challenge. Il suo gruppo ha partecipato con Terramax, uno dei pochi veicoli che riuscì a completare il percorso previsto. Nelle settimane passate abbiamo parlato della Stanford University e delle loro vetture robotizzate: in cosa vi assomigliate e in cosa invece vi distinguete?
Molto semplice: abbiamo gli stessi interessi e lavoriamo su argomenti simili (anche se noi siamo più focalizzati sull’uso della visione mentre loro sull’uso dei laser). La principale differenza è il budget e la sorgente dei finanziamenti, purtroppo.
Noi fortunatamente siamo molto conosciuti all’estero e lavoriamo con aziende straniere, da cui traiamo circa il 95% del budget. Abbiamo lavorato e stiamo lavorando con aziende di dimensioni planetarie che ci hanno scelto rispetto ad altri concorrenti, anche americani.
Non lo dico per vantarmi ma è un dato di fatto: stiamo lavorando con Caterpillar, Rockwell Collins (quelli che progettano i piloti automatici per Boeing e Airbus), con US Army, siamo stati invitati al Pentagono a presentare le nostre attività, e siamo stati selezionati da Thales tra numerosi centri di ricerca europei.
In Italia, invece, non siamo mai riusciti a farci approvare dei progetti finanziati -seppur poco- dalle nostre istituzioni. Viceversa sono stato scelto dall’European Research Council e mi hanno dato un grant di 1.8 milioni per portare avanti la mia ricerca, che in Italia viene effettuata solo da altri due gruppi.
Ribadisco questo solo perché sono stanco del modo in cui veniamo trattati ed ignorati nel nostro Paese. Un esempio? Le idee che poi hanno portato a ottenere il grant da ERC le avevo proposte anche per un progetto Italiano, ma è stato rifiutato. Fortunatamente siamo riusciti a farci finanziare dall’estero e riesco a mantenere qui da noi i cervelli delle ottime persone che lavorano con me (ovviamente tutti precari). Peccato però che i risultati vengano poi a portare vantaggi alle aziende estere, in concorrenza con quelle Italiane.
Mi scuso dello sfogo, ma respirando spesso l’aria di altre realtà distribuite a livello globale, noto tristemente le differenze.
Facciamo ora un passo in avanti: quali sono le frontiere tecnologiche che l’industria robotica oggi vuole superare, in particolare nel settore di cui lei si occupa? In quale direzione sta andando la ricerca del suo gruppo?
Beh, direi che la tecnologia è abbastanza avanzata. Stanno nascendo sensori innovativi che portano ottimi progressi. Direi però che la frontiera su cui ancora bisogna spingere è l’algoritmica per il sensing: in altre parole per la percezione e l’interpretazione dell’ambiente circostante.
Voglio dedicare quest’ultima parte di articolo al VisLab Intercontinental Autonomous Challenge, il viaggio Italia-Cina senza conducente con mezzi ad “impatto zero” (il virgolettato è per i puristi del termine ;-).
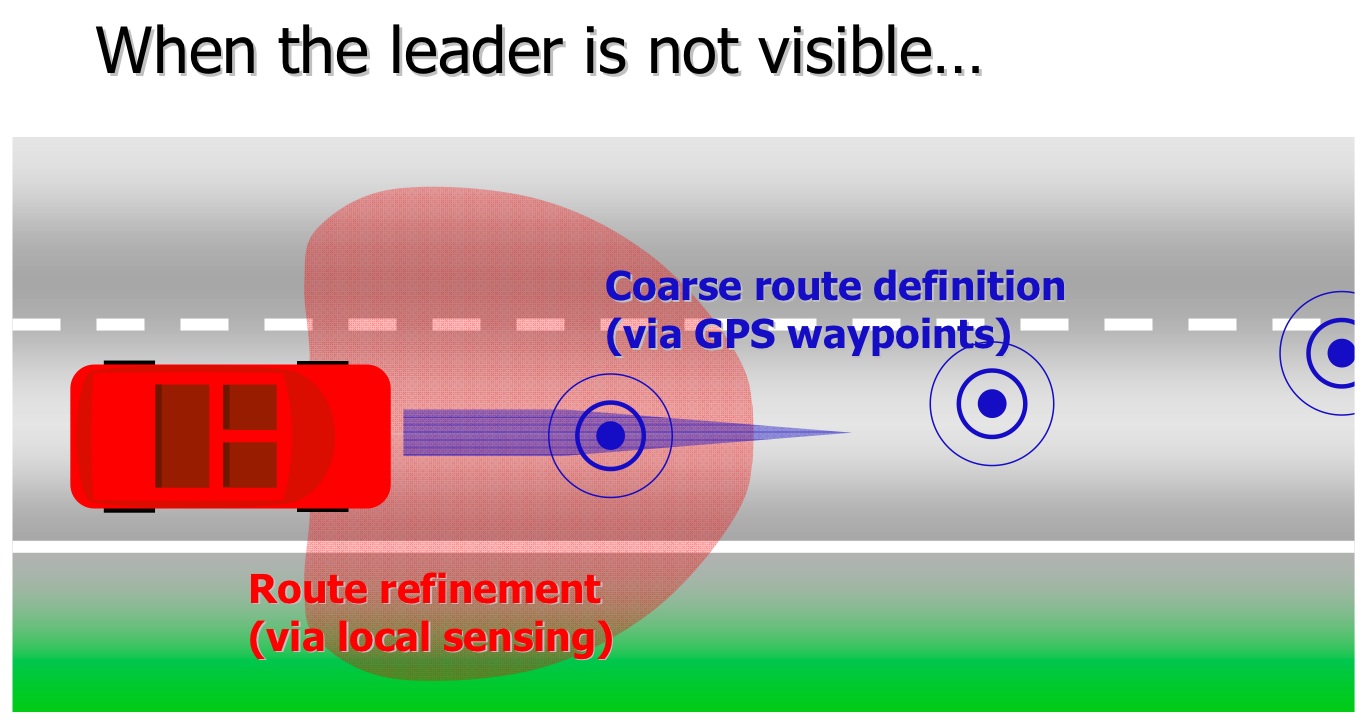
In particolare verranno impiegate coppie di “furgoncini” Piaggio Porter elettrici (quattro in tutto, due di backup), equipaggiati con pannelli solari, dotati della stessa suite di sensori ma con differenti obiettivi: un “pilota” che farà uso di tutta la suite di rilevazione, e un follower che farà uso soltanto dei sensori a basso costo, collegato al pilota che condividerà tutte le informazioni acquisite strada facendo. Broggi ha rimarcato come la versione follower faccia uso di tecnologie già collaudate, che presentano un alto tasso di affidabilità e potrebbero essere adottate fin da subito.

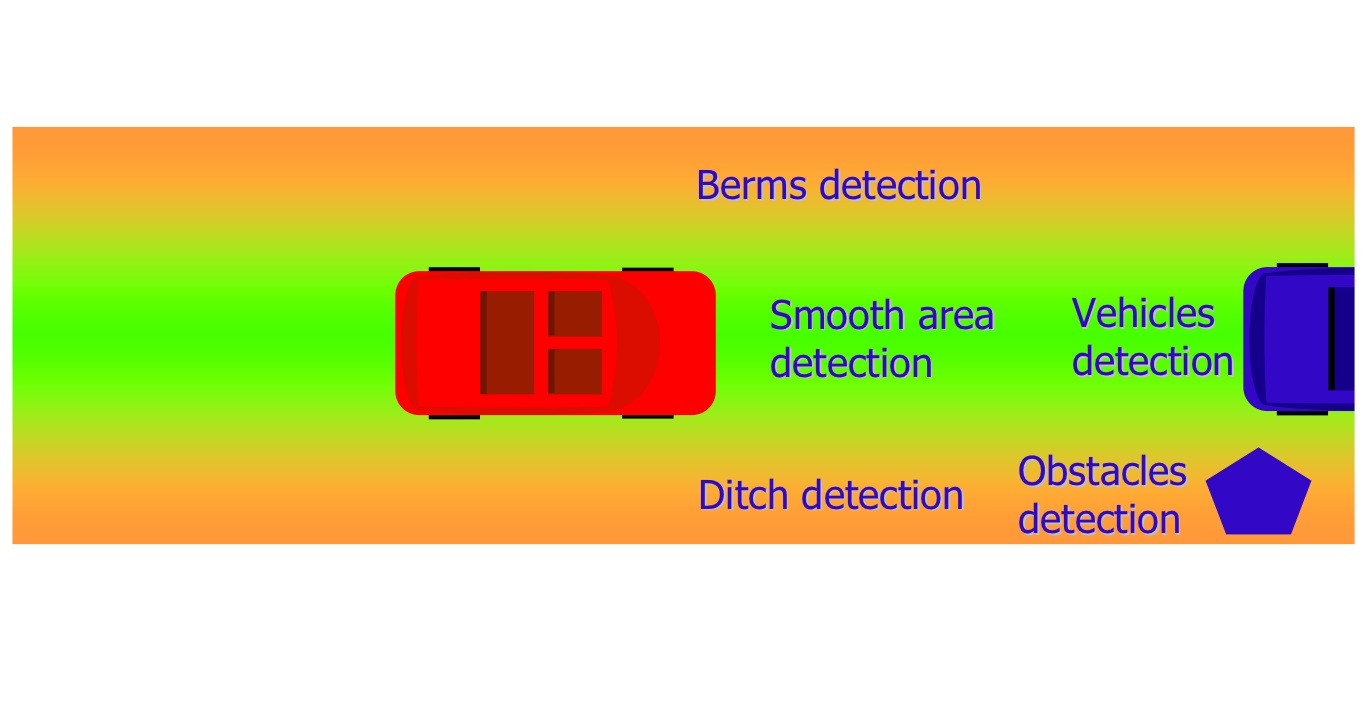
I veicoli saranno dotati dei seguenti sensori:
- riprese video stereoscopiche/3D anteriormente e posteriormente tramite quattro telecamere
- tre telecamere panoramiche anteriori
- tre sensori laser “monobeam” (di cui uno posteriore e due montati agli angoli anteriori del veicolo)
- un sensore laser “multibeam” montato anteriormente
Il percorso offrirà al VisLab l’occasione di sperimentare e analizzare un’ampia varietà di scenari stradali, ovvero traffico in aree urbane, superstrade/autostrade e perfino tratti in fuoristrada o sterrato, il tutto con le variabili tipiche di ogni paese (segnaletica, norme, infrastrutture) e il “traffico” che li rappresenta. Il viaggio, di circa 13mila chilometri, si concluderà dopo tre mesi il 10 Ottobre 2010, con la consegna di alcune merci a Shangai in concomitanza al 2010 World Expo.
Tra i partner dell’iniziativa figurano il Comune di Roma, interessato a sperimentare un sistema di trasporto merci leggero e senza conducente nel fatidico “ultimo miglio”, e Overland il quale offrirà supporto con i suoi mastodontici truck già collaudati in giro per il mondo.
Il viaggio partirà il 10 Luglio p.v. e farà alcune tappe dimostrative in città e centri di ricerca che verranno incontrati strada facendo, non resta che tenere d’occhio il sito ufficiale del VisLab se si vuole “toccare con mano” i piccoli mezzi protagonisti di questa impresa.







